综合使用示例
概述
基于I2C完成用户态下MPU6050传感器的调用和数据处理,且通过串口在PC上实现姿态可视化。
设备连线
使用USB转串口芯片(以CH343为例)、杜邦线若干,将传感器与开发者套件相连。
将CH343的TXD连接开发者套件的UART0_RX(10),CH343的RXD连接开发者套件的UART0_TX(8),GND接GND(6),再将USB转串口芯片连接PC。
MPU6050 | 开发者套件管脚编号 | 开发者套件管脚名称 |
|---|---|---|
VCC | 1 | 3.3V |
GND | 9 | GND |
IIC_SDA | 3 | I2C7-SDA |
IIC_SCL | 5 | I2C7-SCL |
MPU_INT | - | - |
MPU_AD0 | - | - |
使用示例
- 单击链接,进入页面获取代码。
- 以root用户登录开发者套件,将代码包上传至开发者套件任意目录并解压,例如“/home/”。
unzip ascend_community_projects-310B.zip cd ascend_community_projects-310B/A200IDKA2MPU6050PostureVisualization
其中“ascend_community_projects-310B/A200IDKA2MPU6050PostureVisualization/motion_display”中的“motion_display.pde”文件需在windows电脑中运行。
- 安装依赖。
安装smbus2库。
conda install -c conda-forge smbus2
安装pyserial模块。
pip install pyserial
- 参考设备连线连接开发者套件与PC,在PC等待驱动自动安装。
- 在PC中打开控制面板,进入“设备管理器>端口”查看对应端口是否出现,如图1所示。
图1 查看端口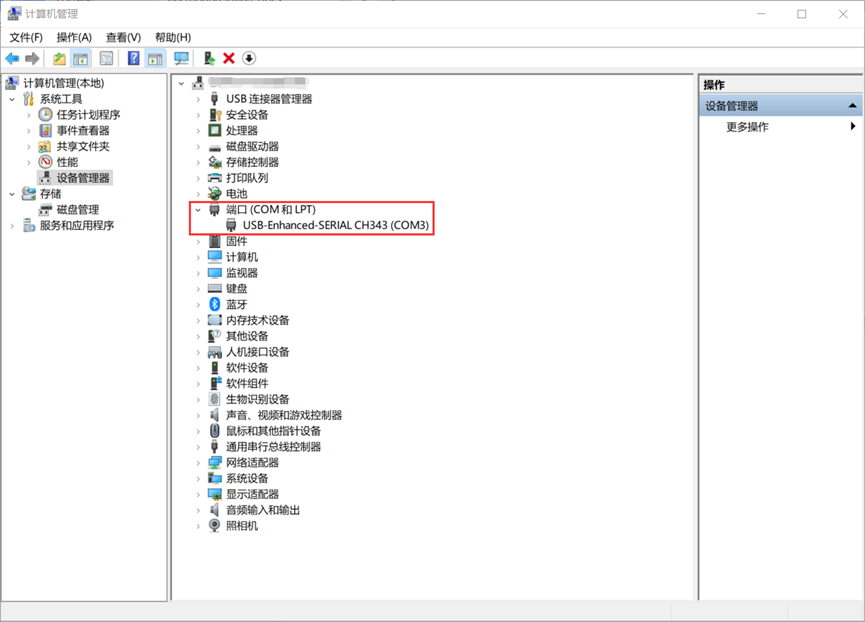
- 进行数据传输与姿态可视化。
单击获取链接下载Processing工具。
使用Processing工具选择“文件>打开”按钮打开2获取的“motion_display.pde”文件。
图2 选择文件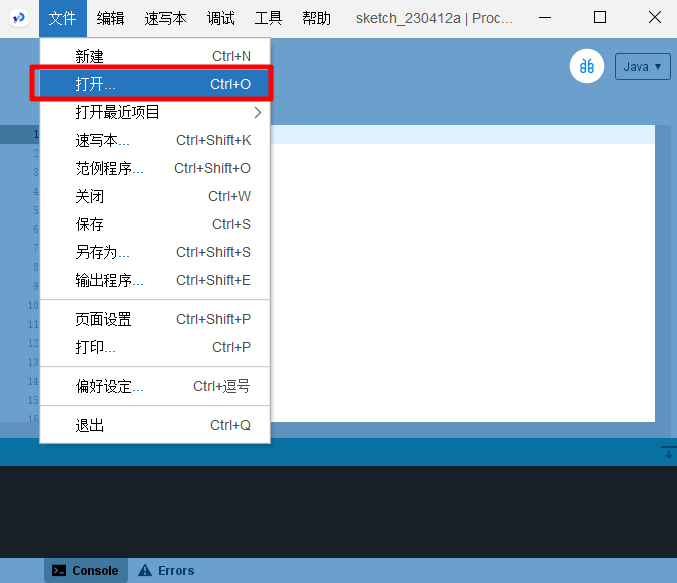
修改代码中的串口号,并单击运行按钮,如图3所示。
...
void setup(){
size(800, 480, P3D); // 创建一个高800、宽480的3D场景
myPort = new Serial(this, "<strong>COM3</strong>", baudrate); // 根据电脑上查询到的端口号进行修改,例如此处为"COM3"
}
...
图3 运行按钮
在开发者套件界面,执行以下命令启动数据传输与姿态可视化。
python mpu6050_motion.py
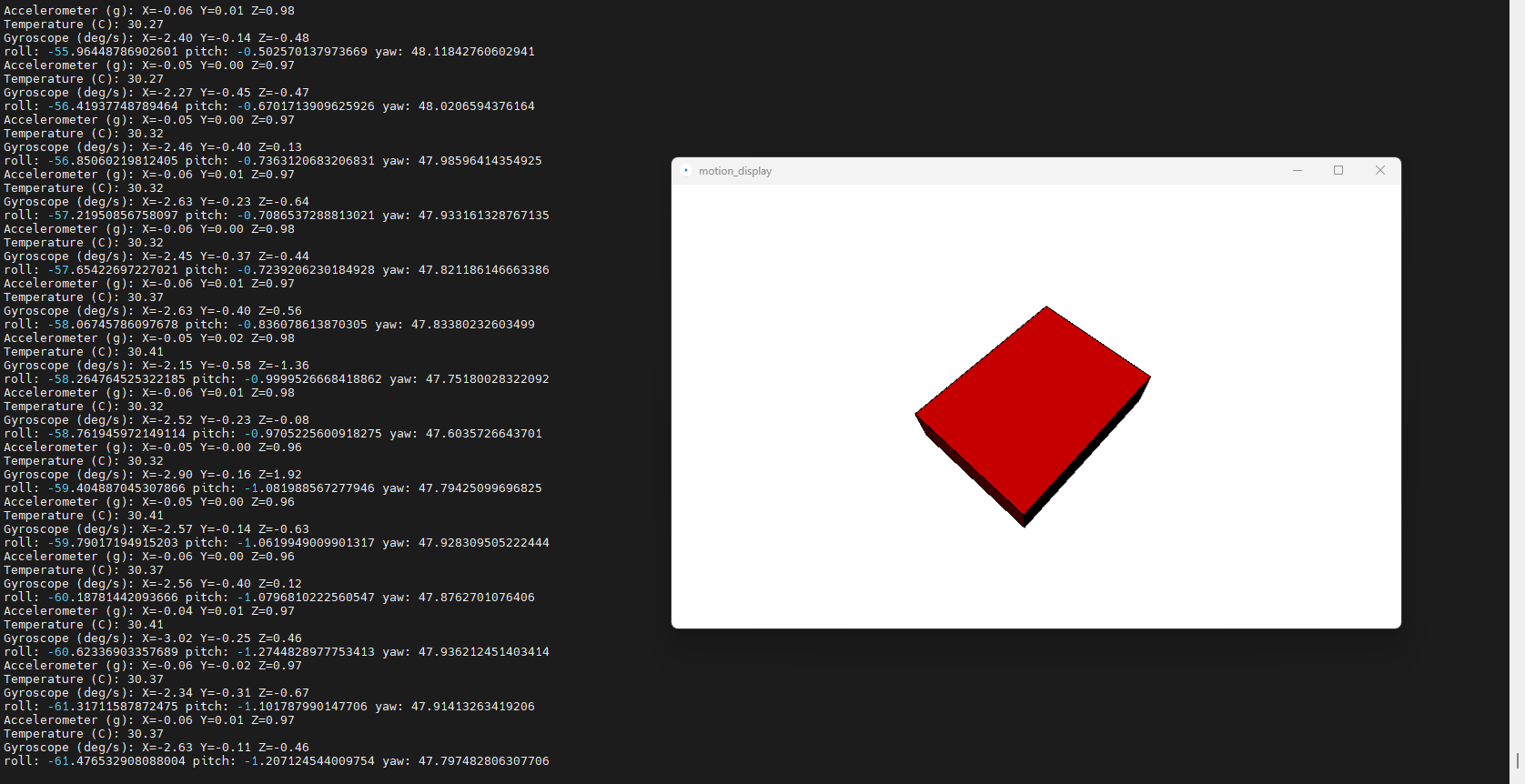
在一定时间间隔持续打印输出姿态信息,并在processing中显示出模拟可视化状态,结果如图4所示。
图4 姿态可视化结果